Etiqueta: ML1
ML1
Mostrando el único resultado
-

Micro Sensor de línea ML1
$ 25.000,0 +IVA1 disponibles
Añadir al carritoUltimo diseño de JSUMO, micro sensor de línea para uso en áreas muy estrechas. Se puede utilizar para micro robots sumo, mini y mega robots sumo como detección de bordes (línea blanca). También es adecuado para robots seguidores de línea.
Nuestro sensor (ML1) da datos casi limpios con superficies blancas y negras debido al alto contraste. Con ese factor, puede utilizar directamente Ml1 con cualquier pin digital en Arduino, PIC o ARM basado (funciona a 3,3 V también y 5V como de costumbre).
Los pines digitales tienen un umbral de tensión de 2,5 voltios, lo que significa que cualquier tensión superior a 2,5 V será detectada por el microcontrolador como lógica 1 y una tensión inferior a 1-1,5 V será detectada como lógica 0. Así que cuando ML1 cuando dan 4,5 voltios que será entendido por mcu como un 1 lógico.
Así que para Arduino sólo tiene que utilizar esta declaración para ver la salida del sensor, que le dará 0 o 1 de acuerdo con el sensor frente a la superficie blanca o negra.
int ML1 = 13; // Conectado a Digital 13, cualquier pin digital esta bien.
int sensorValue = digitalRead(ML1);La segunda opción es utilizar las entradas analógicas del controlador. Con la lectura analógica podemos hacer un reconocimiento más seguro de blanco o negro . (Más adecuado para los robots de sumo, se puede programar por debajo de 1V es la superficie blanca, más alto de 1V es negro)
Así que la lectura analógica será
int ML1 = A0; // Conectado a Analog0 , cualquier pin analógico es válido.
int sensorValue = analogRead(ML1);
Productos Destacados
-
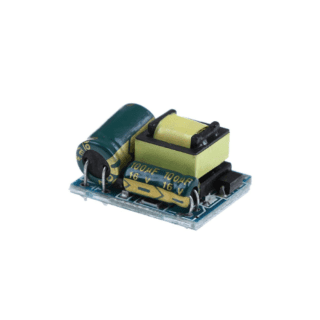
 Módulo Fuente de Alimentación Aislada AC-DC 12V 300mA 3.5W
$ 8.000,0 +IVA
Módulo Fuente de Alimentación Aislada AC-DC 12V 300mA 3.5W
$ 8.000,0 +IVA
-
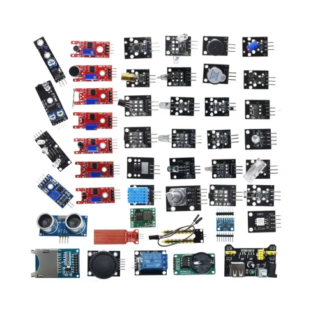
Kit de 45 sensores para Arduino
$ 153.000,0 +IVA
-
Adaptador Enchufe Americano Compacto para Viaje
$ 5.500,0 +IVA